Exemplo 7.1: Determine as posições relativas etnre as retas r: 3x-4y=1 e s: X=(-1,0)+t(2,-1)
import sympy as sp# reta rnr=sp.Matrix([3,-4]) #vetor normalR=sp.Matrix([[0,-1],[1,0]]) #matriz rotação 90ºprint('Vetor diretor da reta r')vr=R*nrdisplay(vr)print('Vetor diretor da reta s')vs=sp.Matrix([2,-1])display(vs)print('Equação para saber se os vetores são múltiplos')l=sp.symbols('l',real=True)eq=sp.Eq(vr,l*vs)display(eq)sol=sp.solve(eq,l)print('Número de soluções')nsol=len(sol)display(nsol)
Vetor diretor da reta r
Matrix([
[4],
[3]])
Vetor diretor da reta s
Matrix([
[ 2],
[-1]])
Equação para saber se os vetores são múltiplos
Eq(Matrix([
[4],
[3]]), Matrix([
[2*l],
[ -l]]))
Número de soluções
0
Como não tivemos soluções na equação, os vetores não são paralelos, logo as retas são concorrentes!
Exemplo 7.2: Determine o ângulo entre as retas r: x+y=6 e s: X=(1,8)+t(2,3)
import sympy as sp#vetor normal da reta rnr=sp.Matrix([1,1])R=sp.Matrix([[0,-1],[1,0]]) #matriz rotação 90ºprint('Vetor diretor da reta r')vr=R*nrdisplay(vr)#vetor diretor da reta svs=sp.Matrix([2,3])#módulo do cosseno do ângulo entre elesc=sp.Abs(vr.dot(vs)/(vr.norm()*vs.norm()))print('Módulo do cosseno do ângulo entre os vetores')display(c)print('Ângulo em radianos entre as retas em radianos')ang=sp.acos(c)display(ang.evalf())import math print('Ângulo em graus')math.degrees(ang) #essa função converte um ângulo em radianos para graus.
Vetor diretor da reta r
Matrix([
[-1],
[ 1]])
Módulo do cosseno do ângulo entre os vetores
sqrt(26)/26
Ângulo em radianos entre as retas em radianos
1.37340076694502
Ângulo em graus
78.69006752597979
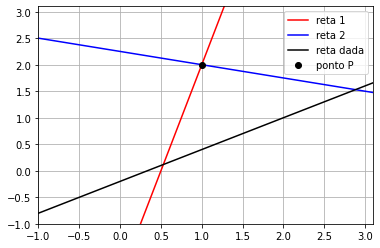
Exemplo 7.3: Determinar as retas que passam por P=(1,2) e formam um ângulo de 45º com a reta r: 3x-5y=1.
import sympy as sp#ponto PP=sp.Matrix([1,2])#vetor normal à reta rnr=sp.Matrix([3,-5])#convertendo ângulo para radianosth=45*sp.pi/180#Matrizes de rotação pelo ângulo de 20° R1=sp.Matrix([[sp.cos(th),-sp.sin(th)],[sp.sin(th),sp.cos(th)]]) #sentido anti-horárioR2=sp.Matrix([[sp.cos(th),sp.sin(th)],[-sp.sin(th),sp.cos(th)]]) #sentido horário#vetores normais das reta r1 e r2n1=R1*nrn2=R2*nr#equações das retasx,y=sp.symbols('x y',real=True)X=sp.Matrix([x,y])print('Equação cartesiana da reta r1')eq1=sp.Eq(n1.dot(X)-n1.dot(P),0)display(eq1)print('Equação cartesiana da reta r2')eq2=sp.Eq(n2.dot(X)-n2.dot(P),0)display(eq2)#Para esboçar as curvas, vamos isolar a variável ysol1=sp.solve(eq1,y)print('Equação reduzida da reta 1')print('y=',sol1[0])sol2=sp.solve(eq2,y)print('Equação reduzida da reta 2')print('y=',sol2[0])
Equação cartesiana da reta r1
Eq(4*sqrt(2)*x - sqrt(2)*y - 2*sqrt(2), 0)
Equação cartesiana da reta r2
Eq(-sqrt(2)*x - 4*sqrt(2)*y + 9*sqrt(2), 0)
Equação reduzida da reta 1
y= 4*x - 2
Equação reduzida da reta 2
y= 9/4 - x/4